
Недавно команда профессора Ю Юшу из Пекинского института технологий опубликовала статьи в IEEE RAL, IEEE TRO и IEEE TASE. Их исследования направлены на решение проблем относительного положения и глобального позиционирования для интегрированных воздушных платформ (ИВП), предлагая систему управления и оценки состояния для ИВП, что закладывает прочную основу для летающих роботизированных систем, выполняющих многофункциональные воздушные операции. В исследовании используется система захвата движения NOKOV для предоставления высокоточных эталонных данных для ИВП.
IEEE RAL (2024): Многопользовательская визуально-инерциальная локализация для интегрированных воздушных систем с неплотным слиянием одометрии и кинематики
Это исследование представляет собой новаторскую многопользовательскую систему локализации для ИВП, искусно объединяющую данные визуально-инерциальной одометрии отдельных БПЛА с внутренними кинематическими ограничениями. Этот подход в полной мере использует внутреннюю геометрическую информацию для эффективного преодоления дрейфа и снижения точности позиционирования, вызванных ограничениями движения.
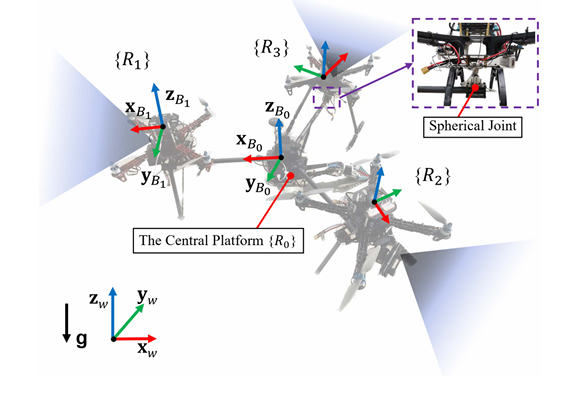
Трехагентная ИВП и иллюстрация систем координат
Исследовательская группа впервые вывела и построила универсальную формулу ограничений, независимую от конкретных кинематических параметров, применимую к различным конфигурациям ИВП, значительно повышая универсальность и надежность системы. На этой основе команда разработала оценщик состояния на основе оптимизации скользящего окна для объединения информации от визуальных одометров отдельных БПЛА с внутренними кинематическими ограничениями ИВП. Благодаря этому механизму оптимизации система оценивает относительные преобразования между агентами во время движения, предоставляя технический путь для высокоточного автономного позиционирования в сложных условиях для интегрированных многороботных систем. Экспериментальные результаты показывают, что этот метод значительно улучшает точность позиционирования, существенно снижая глобальный дрейф и значительно уменьшая ошибки относительного позиционирования по сравнению с базовыми методами.
Система захвата движения NOKOV предоставляет высокоточные эталонные траектории для агентов ИВП и центральной платформы, позволяя оценить и проверить предложенную производительность локализации системы.
Цитирование
Lai G, Shi C, Wang K, et al. Многопользовательская визуально-инерциальная локализация для интегрированных воздушных систем с неплотным слиянием одометрии и кинематики[J]. IEEE Robotics and Automation Letters, 2024, 9(7): 6504-6511.
IEEE TASE (2025): Тесное слияние одометрии, кинематических ограничений и UWB-систем дальномеров для оценки состояния интегрированных воздушных платформ
В данной статье рассматривается проблема точного позиционирования интегрированных воздушных платформ (ИВП) в сложных условиях. Предлагается метод, использующий только бортовые датчики и реальные данные UWB-измерений, что повышает практическую применимость ИВП в реальных условиях и предлагает новые идеи для децентрализованного позиционирования нескольких воздушных аппаратов.
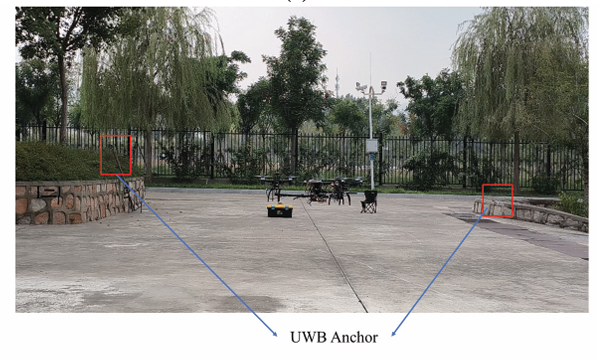
Среда во время реального полета
Исследование инновационно объединяет физические ограничения ИВП с данными UWB-дальномеров для быстрого и эффективного объединения многозвенных координатных систем и точной оценки положения якорей. Команда сформулировала децентрализованную задачу оптимизации для каждого подчиненного аппарата на основе ограничений по положению, скорости и ориентации, назвав её алгоритмом Vision-Inertial-Range-Physical Odometry (VIRPO). Децентрализованный дизайн снижает зависимость от центрального процессора, повышая масштабируемость системы. Обширная оценка на наборах данных показывает, что алгоритм VIRPO достигает более высокой точности позиционирования по сравнению с базовыми методами, снижая дрейф одометра на 28.7% на реальных наборах данных. Это исследование стало первым интегрированием алгоритма в реальную систему ИВП, и эксперименты по полетам успешно подтвердили его производительность в практических приложениях.
Система захвата движения NOKOV предоставила высокоточные данные о положении для ИВП, что позволило создать симулированные данные UWB-измерений для оценки производительности алгоритма.
Цитирование
Yu Y, Fan Y, Lai G, et al. Тесное слияние одометрии, кинематических ограничений и UWB-систем дальномеров для оценки состояния интегрированных воздушных платформ[J]. IEEE Transactions on Automation Science and Engineering, 2025.
IEEE TRO (2025): Разносторонние задачи на интегрированных воздушных платформах с использованием только бортовых датчиков: управление, оценка и валидация
В этом контексте профессор Ю Юшу опубликовал статью «Разносторонние задачи на интегрированных воздушных платформах с использованием только бортовых датчиков: управление, оценка и валидация» в журнале IEEE Transactions on Robotics and Automation (IEEE TRO), одном из ведущих журналов в области робототехники, в 2025 году. Опираясь на предыдущие работы, это исследование предлагает комплексную систему управления и оценки состояния, предназначенную для полного использования потенциала ИВП для выполнения различных задач.
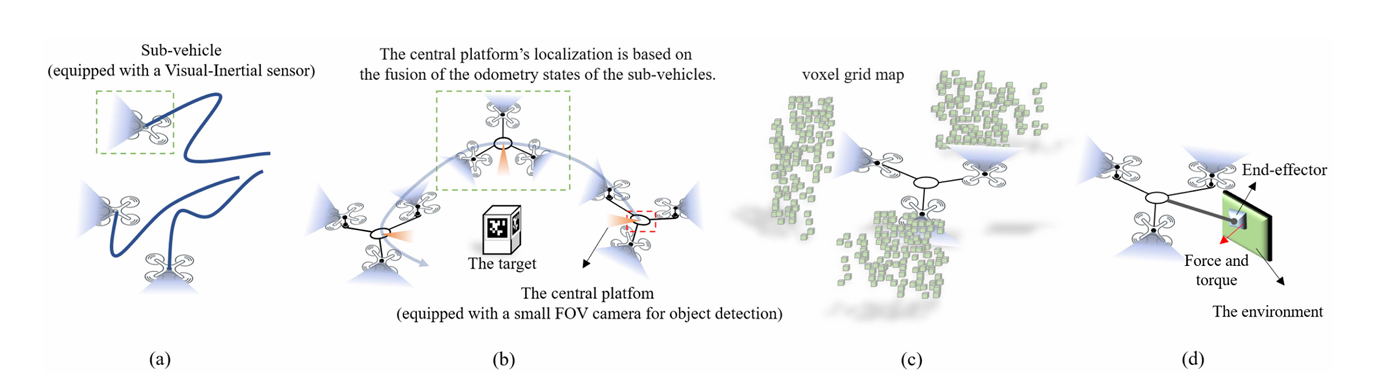
Снимки разных задач для трехэлементной ИВП
Статья представляет универсальную интегрированную систему, объединяющую базовое управление, интерактивное управление, прямое управление силой/моментом, алгоритмы целевого наблюдения с учетом восприятия и алгоритмы оценки состояния на основе слияния движения и одометрии. Функциональность достигается без использования датчиков силы/момента или внешних систем позиционирования, что значительно повышает автономность и универсальность системы.
Для обеспечения постоянного наблюдения за целью во время движения исследование разработало алгоритм коррекции ориентации с учетом зрения, названный Perception-Aware Model Predictive Control (PAMPC). Этот алгоритм позволяет сложной динамической системе ИВП постоянно держать цель в поле зрения. Универсальная, глобально действенная и вычислительно эффективная схема управления решает проблему эффективного восприятия цели в сложных динамических средах.
Для решения задач автономного позиционирования ИВП без внешних систем позиционирования данная статья предлагает алгоритм оценки относительных преобразований (RTE). С помощью неплотного слияния кинематических ограничений подчиненного аппарата и центральной платформы с данными визуально-инерциальной одометрии (VIO) этот алгоритм значительно улучшает общую глобальную точность позиционирования всей платформы. Эксперименты на реальном прототипе ИВП впервые демонстрируют возможность выполнения множества сложных задач исключительно с использованием бортовых датчиков, подтверждая эффективность предложенной системы и алгоритмов слияния.
Система захвата движения NOKOV предоставила высокоточные эталонные траектории для ИВП, что позволило провести строгую оценку и проверку точности и эффективности предложенных методов локализации.
Цитирование
Wang K, Lai G, Yu Y, et al. Разносторонние задачи на интегрированных воздушных платформах с использованием только бортовых датчиков: управление, оценка и валидация[J]. IEEE Transactions on Robotics, 2025.



